



.jpg)



当前位置:首页»企业
.gif)
- 企业简介
-
浙江中控软件技术有限公司位于浙江省杭州市,自20世纪90年代成立以来,一直致力于自动化软件产品(实时数据库、先进控制与优化、节能与优化、安全应急系统、生产执行系统、能源管理中心系统等)的研究开发、工程实施和技术服务。
- 公司类型:供应商
- 联系方式
-
- 浙江中控软件技术有限公司
- 地址:浙江省杭州市滨江区六和路309号中控科技园
- 邮编:310053
- 电话:0571-86667666
- 传真:0571-86667616
- 网址:http://www.soft.supcon.com/
- Email:soft@supcon.com
- 联系人:
- 案例详细
-
标题 城市路网和快速公路交通流的分散协调控制 技术领域 工业安全 行业 简介 利用模糊理论对城市路网和快速公路交通进行实时分散协调控制。把路网和快速公路作为一个大系统,子系统为路网中的各个交叉口,每个子系统有一个控制器,该控制器根据它自己和相邻子系统的交通流信息来动态管理绿灯相位及绿灯时间。控制器有三个模块组成:相序选择模块,绿灯判断模块和相位切换模块。控制器的控制目标是保持快速公路主线密度均衡和路网内各车辆平均延误时间最短。仿真研究表明该方法控制效果较好。 内容 
朱伟良 (1968-)
男,1990年毕业于吉林工业大学(现吉林大学)交通运输管理专业,获工学学士学位,交通科技工程师。现任浙江省上虞市公安局交通警察大队副大队长,先后主持了上虞市道路交通管理规划、城市交通信号灯改造、公路智能卡口和电子警察建设、上虞市三环线绿波带建设等项目30余项,主要研究领域为智能交通、交通工程等
基金项目:国家863计划资助项目 (2007AA11Z216);国家自然科学基金资助项(50708094);浙江省科技计划资助项目(2007C21169)
摘要:利用模糊理论对城市路网和快速公路交通进行实时分散协调控制。把路网和快速公路作为一个大系统,子系统为路网中的各个交叉口,每个子系统有一个控制器,该控制器根据它自己和相邻子系统的交通流信息来动态管理绿灯相位及绿灯时间。控制器有三个模块组成:相序选择模块,绿灯判断模块和相位切换模块。控制器的控制目标是保持快速公路主线密度均衡和路网内各车辆平均延误时间最短。仿真研究表明该方法控制效果较好。
关键词:城市路网;城市快速公路;分散协调控制;模糊理论
Abstract: This paper uses the fuzzy theory to solve the real time road networks and
expressway traffic distributed control problem. The road networks and expressway are
regarded as a large scale system,and the subsystems are the intersections in the road
networks. Each subsystem has its own traffic controller which manages the phase of green
light and the phase length dynamically according to its own and its neighbor’s
traffic situations. The controller consists of three modules: the phase sequencer, the
green phase decider and the phase switch. The object of the controller is to make the
expresswayunblocked and the average vehicle delay time of networks shortest. The simulation
shows good performances.
Key words: Urban Networks; Urban Expressway; Distributed and cooperative control; Fuzzy
Theory
1 引言
城市快速公路是指位于城市内适用于汽车快速(或高速)通行的道路,城市快速公路主要功能是分担城市内长距离交通和进出城交通需求。现代城市交通控制系统不再单单是路网交叉口信号灯控制,而是包括受交叉口信号灯调节的路网交通系统和城市快速公路交通系统(国内如杭州的高架快速路和环城公路),二者通过出入口通道耦合在一起,城市大交通网络构成了一个复杂的非线性大系统。
大多数交通控制研究不是侧重于快速公路匝道控制器的优化设计,便是偏重于路网交通信号的配时调节,一般很少考虑二者的协调[1-3]。因此,许多大城市不同程度的存在着:1)快速公路入口通道处超长排队影响着相邻路网道路的正常交通;2)因快速公路出口通道的通行能力受限于关联的路网道路所能接受的服务能力,当流出需求大于此通行能力时,出口通道将出现排队甚至延伸至主线上,造成快速公路交通堵塞;3)快速公路和路网交通需求的不平衡。
本文利用模糊理论对包含城市路网和快速公路的城市大交通网络进行实时分散协调控制[4][5]。对城市快速公路不设立出入口匝道控制(目前国内多数市内快速公路都如此),这部分功能由与快速公路出入口通道相邻的交叉口信号灯控制来完成。图1是城市大交通网络示意图,其中上面是一条城市快速公路,下面部分是城市路网,交叉口分两类:A类交叉口定义为路网中没与快速公路出入口通道相邻的交叉口,它仅控制路网交通流;B类和C类交叉口分别定义为与快速公路入口通道和出口通道相连的交叉口,它协调路网和快速公路交通流。基本控制思想是:把城市大交通网络作为一个大系统,子系统为路网中的各个交叉口。每个子系统有一个控制器,该控制器根据它自己和相邻子系统的交通流信息来动态管理绿灯相位及绿灯时间。控制器的控制目标是保持快速公路主线密度均衡和路网内车辆平均延误时间最短。仿真研究表明该方法控制效果较好。
图1 城市大交通网络示意图
2 控制器设计
2.1 简介
按照分散控制原则,在城市大交通网络中的每个交叉口建立一个模糊控制器来进行优化控制。为了补偿由于各控制器相互独立而丢失的各交叉口间和交叉口与快速公路间相互耦合信息,采取如下措施:第一,各控制器的输出要保证在时间上一致,从而减少车辆延误;第二,当A类交叉口下游交叉口存在过多的车辆或B类交叉口相连的快速公路上密度较大时,要控制当前交叉口相应相位的车辆驶出,当C类交叉口相连的快速公路上密度较大时,要优先放行快速公路出口通道对应相位上车辆的驶出,从而避免在路网和快速公路上出现交通拥挤。
为了对城市大交通网络进行有效的控制,采用了相序优化,即除了当前绿灯相位外,所有的红灯相位中交通要求最严重的相位优先放行。控制器包括三个模块:相序选择模块,绿灯判断模块和相位切换模块。每个模块都有自己的模糊规则。相序选择模块用来评价除当前绿灯相位外所有红灯相位的交通情况,然后选择交通情况最紧急的相位为下一个优先放行的相位。绿灯判断模块用来评价当前绿灯相位的交通情况,从而对是否该停止放行当前绿灯相位作出判断。相位切换模块根据前两个模块的输出来决定是否需要进行绿灯相位切换。控制器每隔一定时间(如4秒)运算一次。该控制器体现了相位序列和绿灯时间随实际交通环境动态改变。
图2 C类交叉口及其所有可能相位示意图
交通信息检测的好坏对控制器的控制效果起着决定性的影响。假定每个交叉口的每条进口引道(快速公路出入口通道除外)上都安装有两个检测器,一个安装在靠近停止线处,另外一个安装在距停止线一定的距离处,如图2。每个检测器应能计算出经过的车辆数。另外,两检测器间的距离与车道的长度成正比,即如果车道长度为大于等于400米时,两检测器间的距离为200米,那么当车道长度为300米时,两检测器间的距离则为150米。
2.2 相序选择模块
相序选择模块是用来决定下一个候选的绿灯相位。它的输入是除当前绿灯相位外所有红灯相位的交通情况,而输出是交通要求最紧急的红灯相位及其优先权PDP(The priority degree of a phase)。PDP反映了对应红灯相位的紧急程度。为了选择候选的绿灯相位,相序选择模块能计算所有红灯相位PDP,经过比较,把PDP最大的红灯相位作为下一个绿灯相位的候选相位。
如果某一红灯相位中有多条车道,相序选择模块首先计算每条车道的交通紧急度UDL(the urgency degree of every lane),然后把该红灯相位中所有车道的UDL的代数平均值作为该红灯相位的PDP。比如,在图2的相位3中,有从西到北和从西到南两股交通流,为了计算相位3的PDP,首选分别计算这两股交通流的UDL,然后把这两个UDL的代数平均值作为为相位3的PDP。
相序选择模块以NCar,ETime,STime和FNCar作为它的模糊输入。NCar表示交叉口某红灯相位中某一车道上两检测器间的车辆密度,其语言值:Z(零),S(小),M(中),L(大),VL(很大);ETime表示该车道上的红灯延续时间,其语言值:Z(零),S(小),M(中),L(大),VL(很大);这两个输入反映了该交叉口本身的交通状况。STime为上游交叉口和当前交叉口该车道之间的相位差,如果上游没有交叉口,可设STime为+∞,其语言值和ETime的语言值相似; FNCar为当前交叉口该车道和下游交叉口两检测器间的车辆密度,如果下游没有交叉口,可设FNCar为0,如果该车道的下游是快速公路的入口通道,那么其语言值为:S(小),L(大);这两个输入反映了相邻交叉口间或交叉口和快速公路间的耦合。相序选择模块的输出是: Urgency,即该车道的交通紧急度,其语言值为:Z(零),L(低),M(中),H(高),VH(很高)。
例如,对于图2的相位5的从南到北的直行车道,NCar为该交叉口入口直行车道上两检测器间的车辆密度;ETime为相位5到目前位置的红灯延续时间;STime为上游交叉口和该交叉口该车道之间的相位差。通过模糊推理,就可得到该车道的Urgency,经过清晰化得到UDL。
相序选择模块的各输入输出变量的模糊划分这里就不详尽描述了,它的模糊规则是这样的:Urgency正比于NCar和ETime,也就是说,当某一车道上两检测器间的车辆数越多(或对应的快速公路出口处密度越大),且(或)该车道上的红灯延续时间越长,那么该车道上的交通情况越紧急,Urgency越大;对于信号一致性,如果上游交叉口和该交叉口该车道之间的相位差越长,该车道的Urgency也越大;如果FNCar越多,表明下游有太多的车辆在等待(或对应的快速公路入口通道处车辆越密),那么应该减小该车道的Urgency。相序选择模块有36条模糊规则,表1列举了部分控制规则。
表1 相序选择模块的部分规则
NCarETimeSTimeFNCarUrgency1LZ2VLLSVH3LMSH4MLSH5MLSH6SSSM7ZZSM………………
2.3 绿灯判断模块
绿灯判断模块根据当前绿灯相位的交通情况,来决定是否停止该绿灯相位的放行。它输出一个叫停止度SDGP(the stop degree of the green phas)的变量,SDGP表示控制器该停止当前绿灯相位放行的程度。类似于相序选择模块,如果当前绿灯相位存在多个车道,那么先计算当前绿灯相位中每个车道的停止度SDL(the stop degree of every lane),然后把各个SDL的代数平均值作为SDGP。
表2 绿灯判断模块的部分规则
RNCarORateFNCarStop1LY2ZZSY3SHSM4LHSN……………
绿灯判断模块以ORate,RNCar和FNCar作为模糊输入。Orate表示交叉口绿灯相位中某一车道的出口车流率,如果该车道对应的是快速公路的出口通道,那么 ,其语言值:Z(零),L(低),H(高);RNCar表示该车道上两检测器间依然滞留着的车辆密度,其语言值:Z(零),S(小),L(大);这两个输入定义了当前交叉口的绿灯时间使用率和交通堵塞情况,代表了该交叉口的车流信息。FNCar的定义同相序选择模块中的定义一样。绿灯判断模块的输出是当前绿灯相位中该车道的停止度(Stop),用来衡量是否该停止当前该车道的放行,其语言值:N(否),M(可能),Y(是)。
绿灯判断模块有10条规则,表2列举了绿灯判断模块的部分规则,其基本思想是:如果绿灯相位中各车道的驶出率较大(或对应的快速公路出口通道处流量较大),且(或)各车道滞留的车辆数较多(或对应的快速公路出口通道处密度较大),那么应该考虑继续放行该绿灯相位;如果下游交叉口中与当前交叉口放行车道相连的车道上滞留较多的车辆(或对应的快速公路入口通道处密度较大),那么应该立即停止当前绿灯相位的放行。
2.4 相位切换模块
相位切换模块的输入分别是相序选择模块的输出Urgency和绿灯判断模块的输出Stop。输出是相位切换权(Switch),用来决定是否该将放行相位切换到由相序选择模块得到的优先权最大的那个候选绿灯相位,其语言值:N(否)和N(是),如果清晰化后的切换度大于某一设定的阀值,那么控制器就切换当前的绿灯相位。
表3 相位切换模块的部分规则
StopUrgencyDecision1NHN2MMN3YMY…………
相位切换模块有15条规则,表3列举了相位切换模块的部分规则,其基本思想是:如果候选相位的优先权很高,且(或)当前绿灯相位的停止权很大,那么马上进行相位切换。
3 仿真研究
为了验证该算法的有效性,分别在轻度交通流量、中度交通流量和重度交通流量三种交通环境下情况下进行仿真,仿真时间是1800s:在0~600s内为轻度交通流量,东、南、西三方向的交通流量分别为1200PCU/h,1250 PCU/h,1300 PCU/h,在600~1200s内为中度交通流量,东、南、西三方向的交通流量分别为1500PCU/h,1550 PCU/h,1600 PCU/h,在1200~1800s内为重度交通流量,东、南、西三方向的交通流量分别为1900PCU/h,1950 PCU/h,2000 PCU/h。每次交通流量的变化相当于一种阶跃干扰。
以车辆延误(单位为h?PCU,即“小时?客车当量”)为性能评价标准,仿真结果如图3所示。由图3(a)可以看出,在三种交通环境下,每次流量的改变,该算法都能使快速公路上的主线密度迅速地恢复到最佳密度值并保持稳定。由图3(b)可以看出,在轻度、中度交通流量环境下,路网车辆延误保持在一种较小值并维持稳定,重度交通流量环境下路网车辆延误较大,这是由于各路段车流量已接近该路段的饱和流量。
图3 仿真结果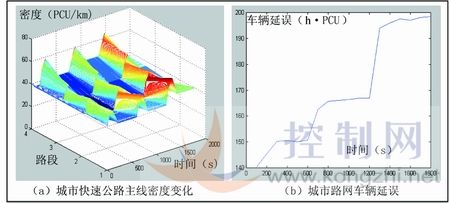
4 结论
城市路网交通和城市快速公路交通的集中控制,是交通领域中的一个研究热点,也是该研究领域中的一个难点。本文根据分散控制原则和模糊理论,设计了一种对城市大交通网络分散协调智能控制的新方法。该方法没有对城市快速公路交通流进行直接的控制,而是通过对各交叉口的有效控制,达到路网和快速公路交通流量的平衡。仿真研究表明,本文提出的控制方法,在各种交通环境下能保持快速公路主线密度维持在最佳值附近,并使整个系统车辆平均延误时间尽可能的最小。
从上世纪90年代以来,国内外的城市交通控制专家和学者一致认为,智能控制将是城市交通控制研究的发展方向。本文以模糊理论为工具对城市路网交通和城市快速公路交通的集中控制进行研究,也是一种有意义的尝试。
参考文献
[1] J.H.Lee, K.M.Lee, H.Lee-Kwang. Traffic Control of intersection group based
on Fuzzy Logic. in Proc. 6th int. Fuzzy Systems Assoc. World Congr., 1995, pp465~468.
[2] 杨晓光, 杨佩昆, 饭田恭敬, 关于城市高速公路交通动态控制问题的研究[J]. 中国公路学报, 1998, vol 11(2): 74~85.
[3] 徐建闽, 许伦辉, 撒元功. 交叉口有交通信号控制时用户最优动态配流模型[J]. 控制理论与应用, 2000, vol 17(1): 117~120.
[4] Papageorgiou M and Blosseville J. M, Hadj-Salem H. Modeling and Real-Time Control of Traffic Flow on the Southern Part of Boulevard Peripherique in Paris[J]. part 1:Modeling, Transpn. Res-A, 1990, vol.24, No.5, 345~359.
[5] 姜紫峰, 荆便顺, 韩锡令. 高速公路入口匝道控制的仿真研究[J]. 中国公路学报, 1997, vol 10(2):83~89.

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号