



.jpg)



当前位置:首页»案例
- 新型雷达定位系统
-
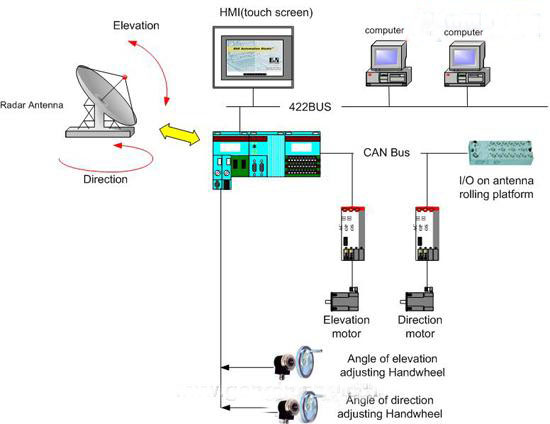
企业: 上海英硕自动化科技有限公司 日期: 2009-07-24 领域: DCS 点击数: 1048 我公司采用贝加莱公司的可编程计算机控制器(PCC)和伺服系统(ACPOS),运用目前欧美比较流行的CAN总线技术,为雷达伺服系统提供了包括俯仰、方位的全套解决方案。此外本系统成功的将原本只有在嵌入式系统中实现的运动算法移植到PCC控制器中,从而大大提高了系统的效率和精度。本系统具体的特点如下:
1.高效精确的运动算法:本系统采用了可变速度的运动控制算法,根据距离偏差计算运动的速度,从而大大缩短了系统的定位时间,同时满足了用户对定位精度的要求。
2.定时运动:系统可以根据用户的要求在某一时刻运动到某个点。3.精确的实时钟:系统可以根据GPS的时钟来自动矫正自己的系统时间,保证时间误差在用户允许的范围。
4.运动轨迹推算:系统可以根据之前的运动速度和位置,推算出未来一段时间内系统的运动速度和位置。
5.操作灵活方便:本系统不仅可以根据上位机的要求进行俯仰和方位的动作,而且还可以通过手轮进行手动的操作。
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号