



.jpg)



当前位置:首页»案例
- 异步电机直接转矩控制系统的仿真研究----Study on the Direct Torque Control System of Asynchronous Motor
-
企业: 控制网 日期: 2009-02-04 领域: 人机界面 点击数: 3265  赵 伟 (1983-)
赵 伟 (1983-)
男,江西进贤人,在读硕士研究生,从事电力电子技术及现代电力传动控制研究。
摘要:阐述了直接转矩控制的基本原理,针对DTC系统的圆形磁链轨迹进行了MATLAB/Simulink的建模与仿真研究,通过仿真实验,得到了定子磁链、转速的仿真波形,仿真结果证明了该建模方法的合理性和有效性,为实际异步电机DTC系统的设计提供了思路,为进一步研究直接转矩控制系统奠定了基础。
关键词:异步电机;直接转矩控制; MATLAB/SimulinkAbstract: In this paper, we describe the basic principles of Direct Torque Control (DTC). We model and simulate the radio system for DTC flux path by the use of MATLAB / Simulink,Through the experiments, we obtain the simulating wave of stator flux and rotation speed. the simulation results demonstrate that the modeling approach, which provides an idea for designing the real asynchronous motor DTC system and gives a foundation for further studying DTC system, is reasonable and effective.
Key words: Induction Motor; Direct torque control; MATLAB/Simulink
1 引言
20世纪80年代德国鲁尔大学的得彭布如克教授和日本学者塔卡哈市分别提出了基于六边形磁链轨迹的直接自控制(DSC)方法和基于近似圆形磁链轨迹的直接转矩控制(DTC)方法。DTC利用空间矢量分析方法,采用两点式Bang-Bang控制调节产生PWM信号,直接对逆变器开关状态进行最佳控制,以获得转矩的高动态性能。本文在MATLAB/Simulink下,设计了一种使定子磁链运动轨迹近似为圆形的异步电机直接转矩控制仿真系统,通过实时计算电机转矩和磁链误差,结合定子磁链的空间位置来选择相应的开关矢量,达到控制异步电机转速的目的。
2 直接转矩控制原理
直接转矩控制系统原理框图如图1所示。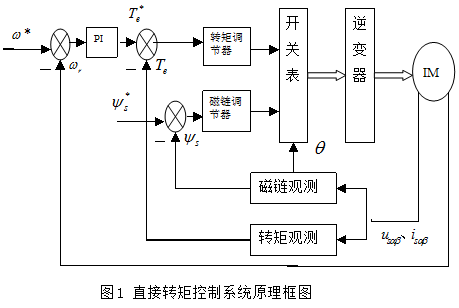
它包括转速调节器、转矩控制器、磁链观测器、逆变器等。通过转矩和磁链的滞环控制,选择合适的电压矢量来调节定子磁链,并通过控制定子磁链的前进(或停止)来控制电机转矩,使之快速跟踪给定信号。同时,通过对定子磁链形状的控制来选择合适的开关状态,产生合适的信号以控制电机运转,从而实现了直接控制策略。
3 异步电机数学模型
3.1 二相静止坐标系上异步电机的数学模型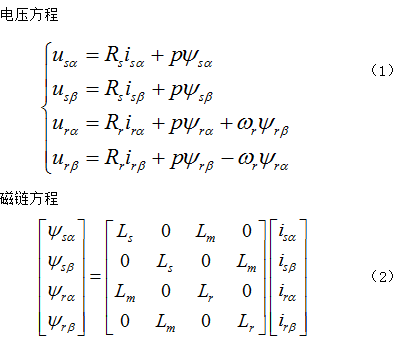

3.2 定子磁链观测器及转矩观测器
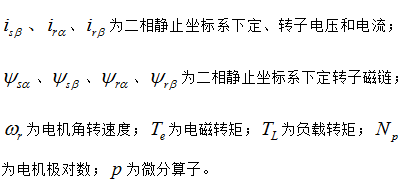
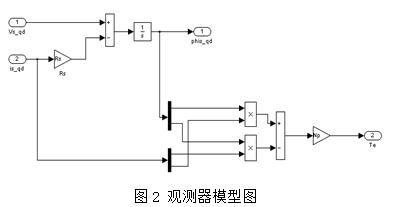
由转矩方程(4)来构建转矩观测器,而为简单起见,磁链观测器采用u-i磁链模型,其数学表达式为:
由此,可得到定子磁链和转矩观测器的仿真模块如图2所示。
3.3 状态开关表
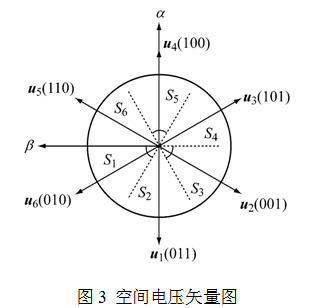
磁链和转矩通过斯密斯触发器输出调节信号SF、ST, “0”表示应减小,“1”表示应增大。扇区的划分如图3所示,输出磁链的位置信号为SN。根据这3个信号,可以在事先确定的电压矢量开关表中查得相应的电压矢量,从而得到逆变器的开关信号来控制逆变器的动作。电压矢量开关表如表1所示。
表1 电压矢量开关表
3.4 逆变器数学模型
根据三相电压型PWM逆变器的工作方式,可以得到电机线电压与开关信号的数学关系:
3.5 直接转矩控制系统模型
综合以上分析,在Matlab/Simulink下,由(1)-(7)式就可以建立直接转矩控制系统仿真模型如图4所示。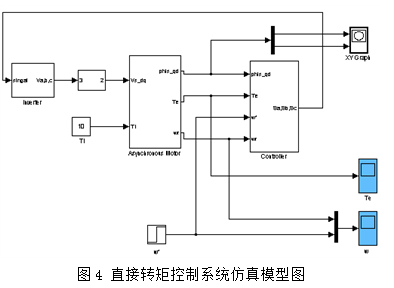
4 仿真实验
按照以上设计的MATLAB仿真系统进行仿真实验。仿真算法选用变步长ode45算法。仿真相关参数如下:电机额定功率为5kW,额定电压为220 V,转动惯量为0.015 kg?m,极对数为2,定子电阻为0.659Ω,转子电阻为0.472Ω,定子电感为0.06249 H,转子电感为0.06249 H,定转子互感为0.0582 H,频率为50Hz,取摩擦系数F为0.0001。仿真过程中,异步电机采用并行方式起动,即磁通和转矩几乎同时增加到参考值。定子磁链幅值给定值Flux=1.0Wb,磁链滞环比较器容差为0. 01。仿真模型中磁链和转速实验结果如图5、6所示。输出转矩如图7所示。
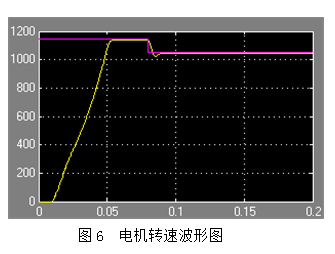

由图5可以看出,电机磁链轨迹近似圆形,磁链控制效果良好;由图6可以看出,电机转速很好了跟踪了给定值;由图8可以看出,在电机启动0.05s后,系统就已经建立稳定的电磁转矩,响应迅速,抗干扰性强。
由上面的仿真实验可以得知,根据直接转矩理论建立的MATLAB异步电机仿真模型,能够得到正确的圆形定子磁链运动轨迹及良好的电机转速曲线,可以依据此仿真系统设计一个实际应用的、基于直接转矩理论的异步电机数控系统。
5 结束语
本研究依据异步电机在静止坐标系下的动态数学模型,介绍了一种基于MATLAB的交流异步电动机直接转矩控制系统仿真模型。仿真结果表明:波形符合理论分析,系统能够平稳运行,具有较好的静、动态特性。利用该交流异步电动机仿真模型,可以准确地产生圆形旋转磁场,可以充分利用计算机仿真的便利性,修改系统各相关参数并考察在不同实验条件下对电机系统的动、静态性能的影响,为分析和设计交流异步电动机控制系统提供了有效的研究手段,也为实际电机控制系统的设计、调试提供了新思路,同时对异步电机直接转矩控制系统的研究进行了有益的探索。
参考文献
[1] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社, 1994.
[2] 李永东.交流电机数字控制系统[M].北京:机械工业出版社, 2003.
[3] 李华德.交流调速控制系统[M]. 北京:电子工业出版社,2003.
[4] 沈本荫.现代交流传动及其控制系统[M].北京:中国铁道出版社,1997.
[5] 刘国海,戴先中.交流电机转速和转子磁链自适应辨识的一种新方法[J]. 电气转动.2007.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号