



.jpg)



当前位置:首页»案例
- 仿人机器人摔倒着地缓冲算法的研究——Study on the Buffering Algorithm for Simulating Humanoid Robot Falling Down Action
-
企业: 控制网 日期: 2008-12-25 领域: 传感器 点击数: 1649  唐 俊 (1980-):男,湖南湘潭人,同济大学硕士研究生,湖南城建职业技术学院讲师,研究方向为SOA、人工智能、信息安全。
唐 俊 (1980-):男,湖南湘潭人,同济大学硕士研究生,湖南城建职业技术学院讲师,研究方向为SOA、人工智能、信息安全。摘要:介绍了仿人机器人的基本概况及仿人机器人在动态行走方面已经取得的技术成果,讨论了刚性仿人机器人在摔倒后对其机体造成的损害,对机器人如何防止摔倒以及摔倒后如何防止机体损害进行了探讨,提出了一套完整的仿人机器人摔倒着地过程中的缓冲算法。
关键词:仿人机器人;机器人摔倒;着地缓冲算法
Abstract: In this paper, we introducehumanoid robot and a basic overview of the existing techniques of humanoid robot in dynamic walking, and discusses the damage to the rigid humanoid robot after it falls. We make a study onhow to prevent the robot from falling as well as how to prevent the damage to the robot caused by the fall action and put forward a complete buffer algorithms for simulating the fall of humanoid robot.
Key words: Humanoid robot; robots fall down; buffer algorithm
1 引言
仿人机器人是机器人研究领域最高研究成果的代表。仿人机器人的最终研究目标是: 研制出具备人类特征(如行走、感官、思维、判断等能力) ,在相当程度上替代人类并服务于人类,且能够与人类和谐共处的高级智能机器人。[1]
仿人机器人除了外形上要和人类保持一致外,还需要能实现双足独立行走,对于仿人机器人的研究是从对行走机构的研究开始的。日本早稻田大学于1973年研制成功的WABOT21是最早的有记载的双足步行人形机构[2] 。1985 年,WABOT21的改进型WHL211在日本筑波科技博览会上展出,被誉为划时代的科技成果。当时的WABOT21行走十分缓慢,每走一步需几秒钟。真正对仿人机器人行走机构进行系列化研究始于日本本田公司。本田公司在1986年到1993年间接连开发了E0到E6等7种行走机器人。这7种机器人都只有腿部机构,主要用来研究行走功能。本田公司又于1993年在研制的P1机器人加上了双臂,使它初步具有了人形。2000年日本本田公司研制出的Asimo[3] 作为第一个真正具有世界影响的仿人机器人诞生了,它的诞生促进了各种各样的仿人机器人研究,开辟了一个仿人机器人蓬勃发展的时代。2002年日本产业技术综合研究所、安川电机公司和清水建设公司成功开发出建筑机器人HRP-2P,这种机器人和真人大小差不多,身长154厘米,体重58公斤,可抬动很重的建材,而且视觉系统也很好。在室内的模拟建筑现场中,机器人可根据指令与人共同搬运建材。另外,机器人还能与人合作固定螺栓。HRP-2P具有30个活动关节,最大行走速度为2km/h,视觉系统由三镜头立体照相机构成,由于采用高密度集成电路,无须采用背包设计,HRP-2P最大的特点是有较好的摔倒缓冲及恢复方法。
2 仿人机器人步态规划技术
运动规划是仿人机器人研究的一个重要方面。经过几十年的发展,出现了多种运动规划方法,归结起来可以分成三类:1)基本的步态规划方法;2)考虑最优函数的步态规划方法;3)路径规划或者实时规划方法。[4]
基本的步态规划方法只是考虑如何实现机器人的行走,而不关心其能量的消耗、关节力矩、运动速度等指标,是最简单步态规划方法。在此基础上出现了以某一函数为指标的最优规划方法。最优规划方法的优点是能充分发挥仿人机器人的性能,降低对系统的要求,其缺点是计算量大,在模型复杂的情况下甚至不可解,所以这种方法只适用于自由度少、结构简单的机器人步态规划中。随着各种传感器技术的发展,越来越过的学者开始考虑实现仿人机器人的智能化。机器人具有智能之后可以独立思考、独立决策一些简单的问题,也只有实现了机器人的智能,才能使机器人更接近于人、更好的服务于人类。
近几年人们在步态规划方面取得了很多成果,有人提出通过视觉导航的在线规划的方法[5] ,这种方法一般需要通过视觉或其他传感器确定每一步的参数,传感器系统比较复杂。
在目前比较成熟的规划方法中,基于ZMP 稳定判据的方法是最为普遍的规划方法,从双足和躯干的运动轨迹确定ZMP 轨迹, 实现稳定行走[6] 。 因此如果可以根据地面的实际情况,实时调整步态参数,设计合理的双足和躯干轨迹,就可以确定ZMP 轨迹,实现稳定行走。
3 仿人机器人常见的摔倒方式及着地缓冲算法
虽然有很多方法用来防止仿人机器人的摔倒,但是仿人机器人比人类还是更容易摔倒。在仿人机器人摔倒后,需要采取一定的措施防止机器人的外部及内部机构由于摔倒的冲击力而导致损坏,并且需要有摔倒后重新站立的恢复机制,只有这样仿人机器人才具有持续行走和工作能力。
根据机器人摔倒时的方向不同,可以分为向前摔倒、向后摔倒和侧翻。下面就这三种摔倒的方式来探讨针对不同摔倒方式的着地缓冲方法。
3.1 仿人机器人向前摔倒着地缓冲方法
人类在向前摔倒的过程中往往是由于身体上部受力或者惯性的作用向前,而足底无法前进而导致的。而人类在向前摔倒的过程中,为了减缓摔倒的力量,会不自觉地用双手撑地,以减轻着地时的力量。仿人机器人在向前着地的过程中为了减轻着地的力量,采用双手支撑的方法是最佳的方式。除此之外,在摔倒时迅速的作出下蹲动作,这样就降低了身体的中心,从而减轻了着地力量以及头部所遭受的撞击。在机器人的膝盖处安装防止冲击的软护垫,减少了膝盖所受的力量,将机器人的手掌也安装柔性材料,这样对手也起到了缓冲作用。
在仿人机器人着地过程中,机器人将迅速执行下蹲的动作,这样降低了机器人中心的高度,也降低了身体倒下的冲击力。接着调整整个手以及胳膊的方位,让胳膊与身体保持90度的夹角。当手掌最新接触到地面的时候,手掌的传感器将接触到地面的信号送到反馈系统,这个时候系统迅速启动肘关节向外扩张,而随着机器人身体的下降,肘关节起到了一个刹车的作用。在外扩的过程中,让所受到的力保持在一个阀值之内,以防止肘关节因受力过度而损坏,如图1所示。
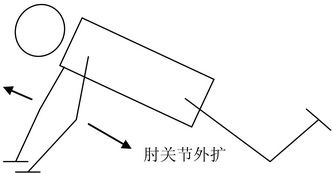
图1 机器人向前着地时借助双手进行缓冲3.2 仿人机器人向后摔倒着地缓冲方法
机器人向后摔倒时尽可能以较低的速度让臀部先着地,并在臀部安装缓冲护垫以减轻着地冲击力。可以将向后摔倒动作划分为5个基本状态[7],在每个状态都生成适当的动作和控制其运动。
1)下蹲状态:该状态是倒地时的初始状态,机器人的重心偏离支撑多边形而不能恢复稳定。机器人将停止所有的运动控制而启动倒地控制,机器人弯曲膝关节以降低臀部高度,弯曲颈部、腰部和手臂关节,以便臀部着地。
2)伸展状态1:在倒地的过程中,当连接机器人脚后跟和臀部着地点的直线与地面的夹角小于设定值时,机器人开始伸展膝关节以减小臀部着地的速度,并确保机器人以臀部着地。
3)着地状态:当角度小于另一个设定值时,机器人准备着地,停止关节的伺服控制。
4)伸展状态2:从着地的瞬间开始后一段时间内,机器人伸展腿部,将机器人的中心往下体移动,以防止机器人因为摔倒时的惯性而继续向后翻倒而使得头部着地,保护颈部关节不被损坏。
5)结束状态:经过一段时间后,确认机器人已经处于静止稳定状态后,机器人伸展关节,准备从倒地状态站起。
如果摔到时的力量特别大,则可以借助手臂来减轻着地力量。在机器人臀部着地后,利用双手手掌撑地,并借助于肘关节的制动机构来降低倒地力量,如图2所示。

图2 机器人后向倒地时借助双手进行缓冲3.3 仿人机器人侧向摔倒着地缓冲方法
机器人在静止时由于有双腿支撑,因此很难从侧向摔倒。但是快速行走中的机器人却由于只有单脚着地,如果这时机器人的中心处于支撑多边形之外,而ZMP却无法位于支撑多边形之外,则可能导致机器人向左或者向右摔倒。
虽然机器人侧向摔倒的概率要小于前向和后向,但因为这种摔倒更多时发生在机器人跑动的过程中,所以其摔倒后对机器人的损害却是最严重的,并且对于机器人的侧向摔倒时的缓冲方法十分有限,因此如何减轻机器人侧向摔倒时所受的损害是目前机器人摔倒研究中的重点。
在机器人侧向摔倒的过程中,应同样先采取下蹲的方式降低重心,然后单手撑地,并利用手肘的弯曲来进行着地力度的缓冲。在单手已经着地后,让身体向前俯冲,然后利用另外一个手撑地,以平稳着地。
4.仿人机器人摔倒后的恢复动作
机器人在摔倒之后需要重新站立,即机器人应该能够从仰躺、俯卧或侧卧状态重新站起。机器人在站立时必须保持身体的平衡,但是不同的状态之间的转换又需要打破这种平衡的状态。在状态转换过程中,需要借助惯性的作用,因此在动作力度的计算中需要充分考虑惯性的作用,这种不平衡的状态只是一个短暂的中间过程,在从一种状态过渡到另外一种状态后,借助陀螺仪和平衡算法,机器人能够很快的转入平衡的稳定状态。
机器人从仰卧到站立需要经过如下几个状态:
1)肘部支撑:利用肘部向后支撑,让头部和身体绕臀部旋转上伸。
2)手掌支撑:在头部和身体直立后,机器人已经由仰卧转为坐立姿态。然后以双手撑起整个上身以及臀部。
3)收退蹲起:在双手的支撑下,双腿可以收回,并且将姿势转为双腿和双手同时受力的情况。
4)收手蹲立:双手向地面用力推,利用地面的反力使身体向前倾斜,从而达到蹲立的状态。这个转换需要机器人对其重心进行动态调整,难度最大。
5)站立:在双腿的作用下,将机器人的姿势由蹲转换成站立。
至此,机器人完成了整个站立过程。5.总结
虽然有了众多机器人平衡算法,但机器人的摔倒仍然是不可避免的。本文通过改进机器人摔倒算法,利用手的支撑来降低着地时的冲击力,并利用柔性的机器人外部设计来增加机器人外壳的缓冲能力,使机器人摔倒着地时能够实现“软”着落。在实际应用中,使用着地缓冲算法能够防止机器人因为摔倒的冲击力而导致损坏,并且能够利用恢复算法快速的重新爬起和站立,提高了仿人机器人的可用性。
参考文献:
[1] 郑嫦娥, 钱桦. 仿人机器人国内外研究动态[J]. 机床与液压. 2006.
[2] Kato I, Group of Bio2Engineering (Waseda University) . Information2powermachine with senses and limbs - WABOT [A ]. Proceedings ofCISM2IFToMM Theory and Practice of Robots andManipulators [ C ].Udine: Sp ringer, 1974. 12 – 24.
[3] Hirae K, HiroseM, The development of Honda robot[A ]. Proceed2ings of the 1998 IEEE International Conference on Robotics and Auto2mation [ C ]. USA: IEEE, 1998. 1321 – 1326.
[4] 王建文. 仿人机器人运动学和动力学分析 [D]. 长沙:国防科技大学研究生院, 2003.
[5] Yagi M , Lumelsky V. Local On2line Planning in BipedRobot Locomotion Amongst Unknown Obstacles。Robotica , 2000 , 18 : 389~402
[6] 马宏绪. 两足步行机器人动态步行研究 [D]. 长沙:国防科技大学机电工程与自动化学院, 1995.
[7] 管贻生译. 仿人机器人[M]. 清华大学出版社, 2007.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号