



.jpg)



当前位置:首页»案例
- 基于PLC的模糊PID控制器在发动机试验台测控系统中的应用
-
企业: 控制网 日期: 2008-08-22 领域: 电源 点击数: 3199 
杨秋云(1983-)
女,四川平昌人,辽宁工业大学在读硕士,
研究方向为智能控制。
基金项目:辽宁省教育厅项目资助(项目编号:05L183)。随着被控系统规模的不断扩大,被控对象越来越复杂,传统的PLC控制系统已逐渐不能满足控制要求,将模拟专家控制经验的模糊控制引入PLC控制系统,与PLC的PID模块结合从而实现模糊PID控制,这是现代自动控制系统的发展趋势之一。现在已有一些PLC生产厂家备有模糊控制模块供用户选用,但其价格非常昂贵。若在原常规控制系统的硬件基础上,利用软件编程来实现模糊控制器,将会降低模糊控制系统的成本。本文结合用PLC研制的测功机-发动机模糊控制系统说明PLC直接查询表方式实现模糊PID控制的方法及梯形图设计的原理。
1 本文设计的基本思想
因发动机是一个典型的多输入、多输出、非线性、时变的复杂系统,对其建模十分困难。在比较了模糊控制和PID控制后,结合二者优点,从而采用模糊PID控制方法。在发动机台架试验中,发动机的负载调节和油门的调节,是整个台架试验的核心部分。本发动机台架模型由发动机、连轴器和电涡流测功机组成。在发动机测控系统中,被控对象是发动机和测功机,通过调整发动机的油门开度和测功机的励磁电流,来控制发动机的转速和转矩。
本系统将发动机转速偏差e和偏差变化率ec作为输入变量,参数Kp、Ki和Kd作为输出变量。模糊PID控制原理如图1所示。

图1 模糊PID控制器原理图模糊PID控制器将给定转速r与反馈的输出转速n比较后的偏差e及偏差变化率ec送入模糊控制器。输入值经过量化、模糊化、模糊推理、反模糊化和量化,得到比例系数Kp积分系数Ki和微分系数Kd的值。PID控制接受Kp、Ki和Kd参数,PID调节器经过下式:
(1)
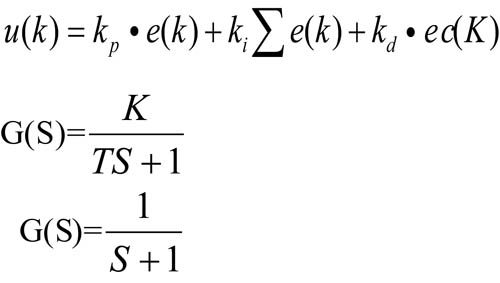
确定的PID控制算法计算得到控制输出量u,控制油门执行器使发动机输出转速n向给定转速r靠近。
2 模糊控制系统设计
2.1 确定变量的语言值域及其量化论域
发动机转速通常在设定值的±50转范围内变化。因此发动机转速的偏差e基本论域为:[-50,50];转速偏差的变化率ec的基本论域为:[-100,100]。输入、输出变量的语言值域为:偏差e{PB,PM,PS,O,NS,NM,NB};偏差的变化率ec{PB,PM,PS,O,NS,NM,NB};调节量Kp、Ki、Kd{PB,PM,PS,O,NS,NM}。偏差e和偏差变化率ec经过量化因子Ge和Gec量化为输入语言变量E和EC。其中E=Ge*e,EC=Gec*ec。我们取适当的输入量化因子Ge和Gec。
偏差E:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};偏差的量化因子定义为:Ge=6/50;
偏差的变化率EC:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};偏差的变化率的量化因子定义为:Gec=6/100;
输出Kp{0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1}。
2.2 隶属度函数的确定及模糊控制规则建
根据模糊理论,E和EC的论域都为[-6,6],输出语言变量Kp、Ki、Kd的论域都为[0,1]。考虑到计算的快捷方便和控制的实时性要求,隶属函数均采用三角形对称的全交迭函数。图2为输入语言变量E的隶属度函数,图3为输出语言变量Kp的隶属度函数。输入语言变量E、输出语言变量Ki和输出语言变量Kd的隶属度函数类似。
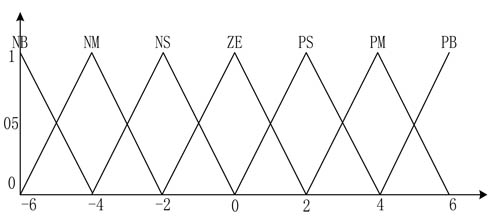
图2 输入语言变量E的隶属度函数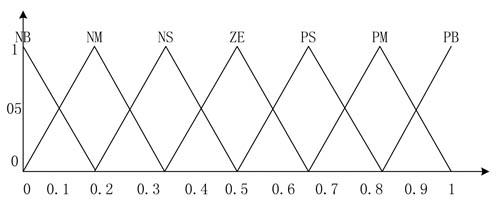
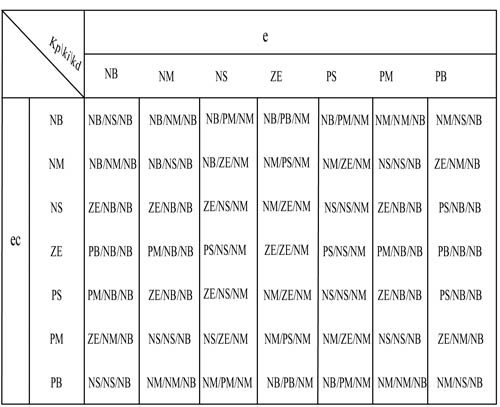
图3 输出语言变量K的隶属度函数本系统采用的模糊规则格式为:If A and B then C and D and E,例如:If误差e是NS、且误差变化率ec是NB,则Kp、Ki、Kd分别是NB、PM、NM。按照PID参数的整定原则以及对转速调节系统的控制过程和操作经验分析可得模糊控制规则如表1所示。
表1 模糊控制规则
2.3 模糊推理、解模糊及建立模糊控制查询表本设计采用Mamdani方法进行推理,分别用max和min实现OR和AND算子,用min实现蕴含关系,用max实现合成规则。然后采用重心法(COA)将模糊量转化为精确量,通过重心法解模糊处理[2],得到量化值输出Kp、Ki、Kd,其三维模糊查询表如图4所示。将Kp、Ki和Kd分别乘以各自的量化因子,就可得到一个清晰的Kp●qp,Ki●qi和Kd●qd做为PID控制器的输入参数。
(a)K三维查询表
(b)K三维查询表
(c)K三维查询表
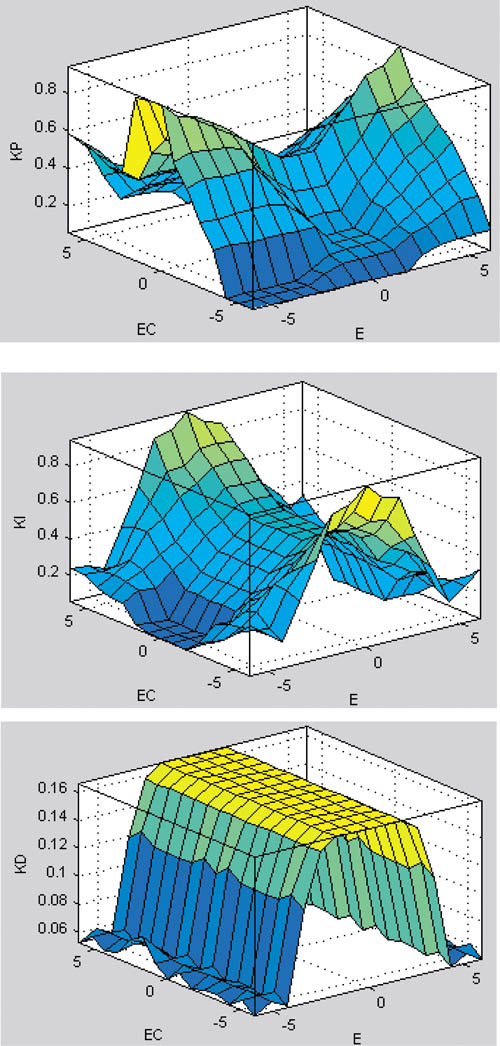
图4 三维模糊查询表将模糊控制表以数据块的形式存入PLC工作存储区,在知道误差和误差变化率的情况下,通过查表便可得到输出控制量,再乘以输出比例因子,便可以得到实际控制量,从而实现对转速的自动调节控制。
2.4 模糊PID控制器的仿真[3]
仿真之前需要建立控制对象的数学模型。通过有关文献[4],可以得到控制对象的传递函数为G(S)=,T为时间常数。取G(S)=。在Simulink中建立好模糊PID控制器的框图。取适当的输出量化因子(qp、qi和qd)和控制量因子(qu)。当输入单位阶跃信号,仿真结果如图5(b)所示。现在取消模糊控制器,常规PID控制仿真结果如图5(a)所示。从两种情况下的单位阶跃响应输入量产生的输出量曲线可以看出,采用模糊PID控制后,控制器具有良好的跟踪性能,调节时间短,超调量明显减小。
(a)常规PID控制器阶跃响应输出曲线
(b)模糊PID控制器阶跃响应输出曲线
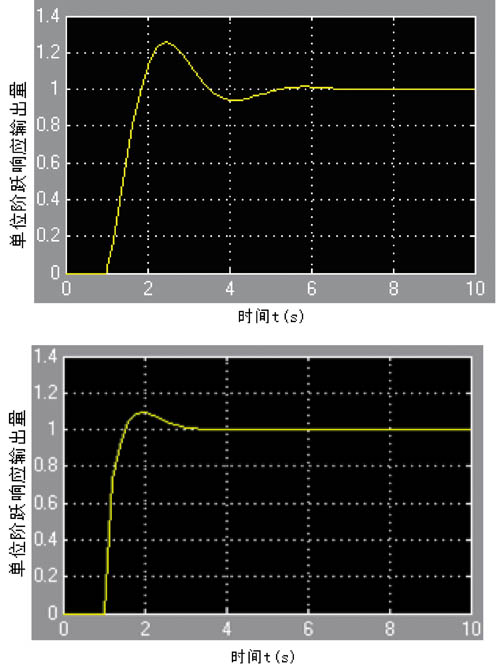
图5 常规PID与模糊PID控制器的单位阶跃响应输出曲线3 模糊控制的PLC实现
3.1 程序设计流程图
在设计中,笔者使用OMRON公司的CPM2A型PLC,利用其A/D模块将输入量采集到PLC中,利用其D/A模块实现执行元件的输出,模糊控制算法流程图如图6所示。
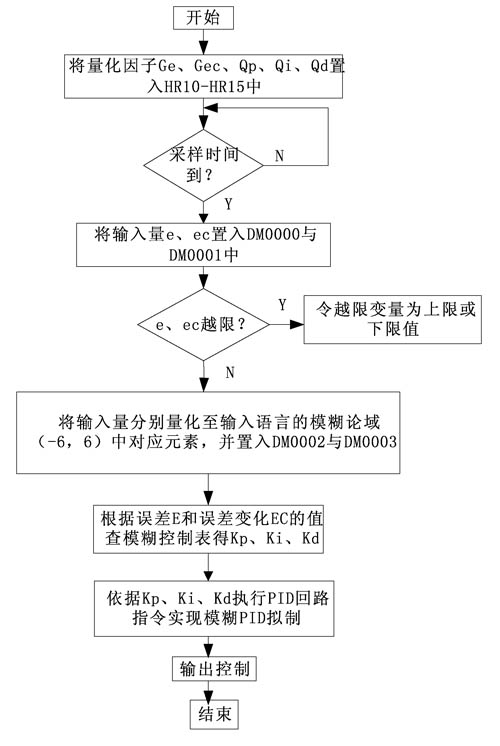
图6 模糊控制算法流程图3.2 关键步骤梯形图设计程序
在上述程序设计中,最关键的步骤就是模糊控制查询表的查询。把所有的模糊控制规则用表格形式表示,从而使模糊推理过程变成了查表的过程,有利于程序控制的实现。为了简化程序设计,将输入模糊论域(-6,6)转化为(0,12)。将Kp、Ki、Kd的模糊控制表按由上到下、由左到右的顺序依次置入DM0100~DM0606中。然后利用基址+偏移地址查询模糊控制表,控制量的基址就是100。根据不同的误差E和误差变化EC选择不同的比例增益项系数Kp。同理确定积分项系数Ki和微分项系数Kd。梯形图程序如图7所示。
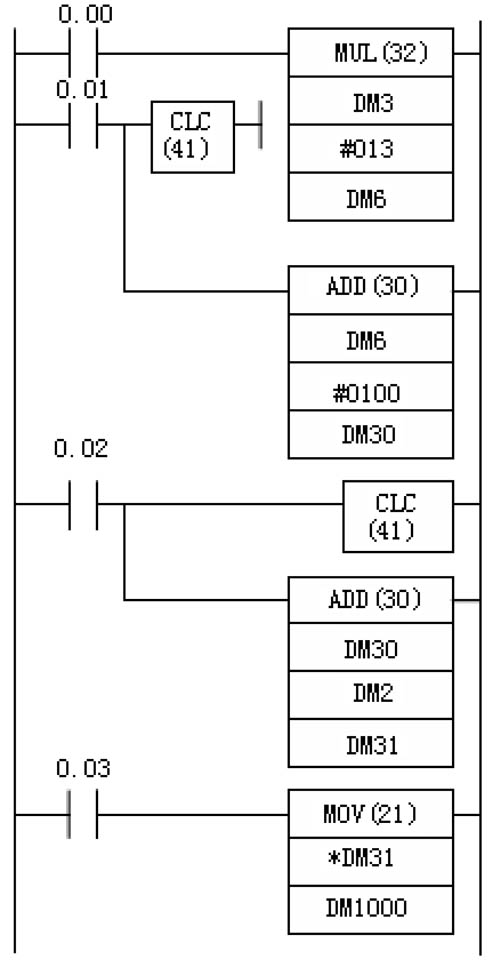
图7 实现模糊控制查询表查询的梯形图程序4 结束语
将模糊控制与PLC控制技术相结合,控制算法兼有PID控制精度高和模糊控制
鲁棒性强的优点,既保留了PLC控制系统控制可靠、灵活、适应性强等特点,又大大提高了控制系统的智能化程度,仿真结果表明控制精度较高、动态响应快、超调量低,对发动机测控系统的完善和改进提供了新的方法。
其它作者:
周振超(1982-),男,辽宁海城人,辽宁工业大学在读硕士,研究方向为智能控制。
张 健(1963-),男,广东汕头人,博士,教授。
参考文献:
[1] 张建荣.基于模糊PID的发动机试验台测控系统[J].辽宁工程技术大学学报,2007,3.
[2] 廉小亲.模糊控制技术[M].中国电力出版社,2003.
[3] 王正林,王胜开,陈国顺.MATLAB/Simulink与控制系统仿真[M].电子工业出版社,2005.
[4] 夏耀周.基于修正因子模糊数模型的柴油机调速技术研究[J].内燃机工程,2004—01.
[5] 杨公源,黄琦兰.可编程控制器应用与实践[M].清华大学出版社,2007.
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号