



.jpg)



当前位置:首页»案例
- 线性广义时滞系统的状态反馈H∞控制
-
企业: 控制网 日期: 2007-08-21 领域: 人机界面 点击数: 412
为适应近代科学技术的发展以及大型工程技术的需要,人们提出了非传统数学模型描述的广义系统。信息传递等因素致使系统普遍存在滞后现象[1,2],因而人们又提出滞后广义系统[3,4]。滞后广义系统的结构相当复杂[4],既不同于无滞后的广义系统,又不同于通常的滞后系统。
H∞控制理论是鲁棒理论的一个重要分支,近年来随着无滞后线性系统H∞理论的日趋成熟和完善,滞后线性系统的H∞理论也得到了相应的发展[5,6]。但由于广义滞后系统结构的复杂性,致使对滞后广义系统的H∞控制问题的研究仍处于初级阶段[4]。本文利用线性矩阵不等式方法,讨论一般的广义时滞系统H∞控制问题,给出了问题可解的一个充分条件以及控制器设计。1 问题描述与预备知识
考虑如下线性广义时滞系统
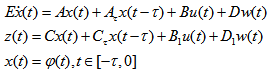 (1)
(1)
其中: 为系统的状态变量,
为系统的状态变量, 为控制输入,
为控制输入, 为干扰输入,
为干扰输入, 为控制输出,
为控制输出,  >0为滞后常数,
>0为滞后常数, 为任一连续的满足相容性条件的初始函数,各系数矩阵为适维常阵。特别地,
为任一连续的满足相容性条件的初始函数,各系数矩阵为适维常阵。特别地, =p<n。不失一般性,假设Cz,B1和D1都为零矩阵,否则可通过状态扩维方式将系统(1)转化为
=p<n。不失一般性,假设Cz,B1和D1都为零矩阵,否则可通过状态扩维方式将系统(1)转化为
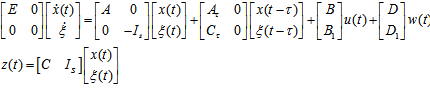
本文的目的是设计无记忆的状态反馈
 (2)
(2)
其中 为常阵,使得系统(1)与反馈控制器(2)构成的闭环系统
为常阵,使得系统(1)与反馈控制器(2)构成的闭环系统
 (3)
(3)
满足如下条件:1)内稳定;2) 表示从干扰输入W(t)到被控输出 Z(t)的传递函数,
表示从干扰输入W(t)到被控输出 Z(t)的传递函数, >0为给定常数。
>0为给定常数。
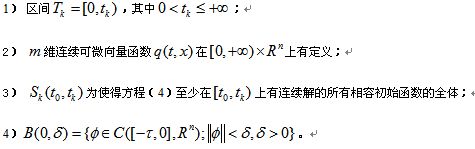
设有滞后广义系统
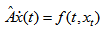 (4)
(4)
其中:
 且连续,
且连续,
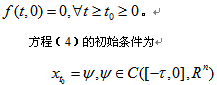 (5)
(5)
在给出稳定性概念之前,还需引用如下记号:




(9)
其中 ,则系统(1)的H∞控制问题有解,即系统(3)内稳定,且满足H∞范数界
,则系统(1)的H∞控制问题有解,即系统(3)内稳定,且满足H∞范数界

2主要结果
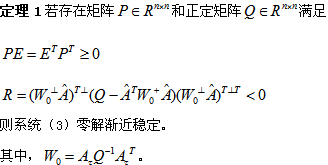
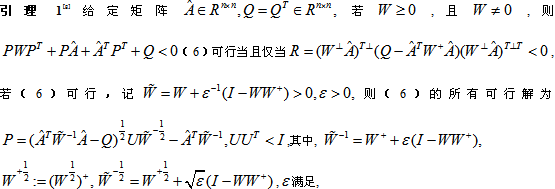
证明 引理2中(7)的第二个不等式等价于下式

则将引理1的结果应用于引理2即可得定理1。
下面给出系统(3)内稳定且满足H∞范数界,即 的一个充分条件。
的一个充分条件。
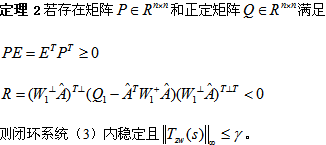
证明 ,则
,则 将引理1中的结果应用到引理3即可证明定理2(证明略)。
将引理1中的结果应用到引理3即可证明定理2(证明略)。
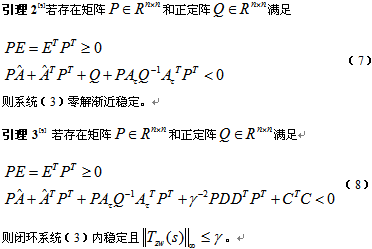
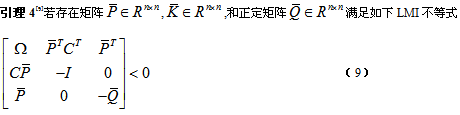
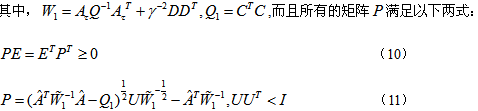
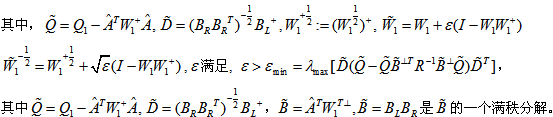
定理3若存在矩阵 满足如下矩阵不等式
满足如下矩阵不等式

证明 使用两次Schur补引理可将(8)式简化成下列不等式

将引理1的结果应用到引理4即可得定理3。
参考文献
[1]Hale J K. Theory of Functional Differential Equations[M].New York:Springer
Verlag,1977.
[2]刘永清,唐功友.大型动力系统的理论与应用——卷三:滞后、稳定与控制[M].广州:华
南理工大学出版社,1992.
[3]Campbell S L. Singular Systems of Differential Equation[M].San Francisco:
Pitman,1980.
[4]刘永清,谢湘生.大型动力系统的理论与应用——卷八:滞后广义系统的稳定,镇定与控制[M].广州:华南理工大学出版社,1998.
[5]Wen T, Yaling C. H∞-optimal control for descriptor systems[A]. Proc of 12th IFAC World Congress[C].Sydney,1993.2:201-204.
[6]Masubuchi I,Kamitane Y,Ohara A,et al. H∞ control for descriptor systems:A matrix inequalities approach[J].Automatica,1997,33(1):669-673.
[7]刘永清,王伟,李远清.大型动力系统的理论与应用——卷七:滞后广义系统解的基本理论与应用[M].广州:华南理工大学出版社,1997.
[8]曾建平,张怡,车玲.一类线性矩阵不等式可行解集的构造.Proceedings of the 24th
Chinese Control Conference[C].Guangzhou,P.R.China,2005.7:538-540.
[9]冯俊娥,程兆林.线性广义时滞系统的H∞状态反馈控制器[J].控制与决策,2003,18(2):159-163.
廖勇,曾建平 (厦门大学自动化系,福建 厦门,361005)
- 下载排行更多»
-
- 1Power Panel宣传样本
- 2公司形象手册
- 3工业PC宣传样本
- 4集成自动化宣传样本
- 5驱动器产品概览样本
- 6贝加莱CNC技术
- 7电机与减速器产品概览
- 8变频器样本
- 9移动车辆及工程机械自动化
- 10Automotion 2013-03
- 11印刷行业专刊(2013)
- 12培训模块之 TM213-自动化操作系统(Runti..
- 13培训模块之 TM210-Automation Studio 3.0..
- 14操作面板和工业PC选型手册
- 15电机和减速器选型手册
- 16APROL DCS宣传样本
- 17APROL EnMon宣传样本
- 182013年菲尼克斯电气德国汉诺威展会精彩回顾
- 192013年菲尼克斯电气德国汉诺威展会报道-4..
- 202013年菲尼克斯电气德国汉诺威展会报道-4..
- 212013年菲尼克斯电气德国汉诺威展会报道-4..
- 222013年菲尼克斯电气德国汉诺威展会报道-4..
- 在线反馈
| 1.我有以下需求: | |
|
|
|
| 2.详细的需求: | |
| * | |
| 姓名: | * |
| 单位: | |
| 电话: | * |
| 邮件: | * |

电话:010-62669087 控制网版权所有未经许可不得转载
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号 北京市公安局海淀分局备案号:11010802023656号
北京市公安局海淀分局备案号:11010802023656号
地址:北京市海淀区上地十街辉煌国际5号楼1416室(100085)
版权所有 控制网 京ICP备14036844-2号